关于
强化学习近年大火,最早是因为AlphaGo使用强化学习打败人类围棋冠军引发的。在那之后,强化学习在工业场景应用越来越多,原来很多做搜索、推荐、广告等一直在用监督学习的业务,也开始使用强化学习来优化用户体验和平台收益了。强化学习实际上很早就提出了,事实上,强化学习来源于控制论。控制论之父叫做维纳,学过信号处理的可能知道他,维纳滤波就是用他的名字命名的。控制论最早源于航天,人们要控制火箭发射装置,将火箭发射到地球之外;控制论还源于机器人控制,人们需要用算法对机器人的行为进行控制。所以,很多讲强化学习的文献也会说强化学习是在优化控制策略。
在这篇文章中,您将学习到
- 环境未知情况下的更好的学习方法?
- 蒙特卡罗方法和时间差分学习
- SARSA, Q-learning
- on-policy 与 off-policy 学习
我期望您至少有:
- 高中数学水平且年满18岁,部分内容需要你了解监督学习,和强化学习基本概念,你可以通过本教程前面的章节进行学习。
- 如果你需要完成实践部分,需要有基本的 python 知识,你可以通过python快速入门快速了解python如何使用。
蒙特卡罗方法
在上一讲中,我们说到,对于一个MDP问题,如果环境已知,也就是知道环境的转移概率P和回报函数R,可以通过求解贝尔曼方程得到值函数,从而得到最优策略,求解的方法有两种,分别是值迭代和策略迭代。如果环境未知,我们提到一种通过随机尝试的方法,先估计出环境,然后转化为环境已知问题求解。这种随机尝试效率很差,需要尝试很多次,并且随机尝试本身就有成本,而且需要等到尝试很多次之后,才能得到一个比较好的策略。那么,能不能在每一次尝试之后,都能将策略提升到一个更好的策略呢?因为每一次尝试,环境的反馈都会提供一部分对环境的信息,如果我们能利用好这部分信息,就有可能从中获取到有价值的信息来提升我们的策略。
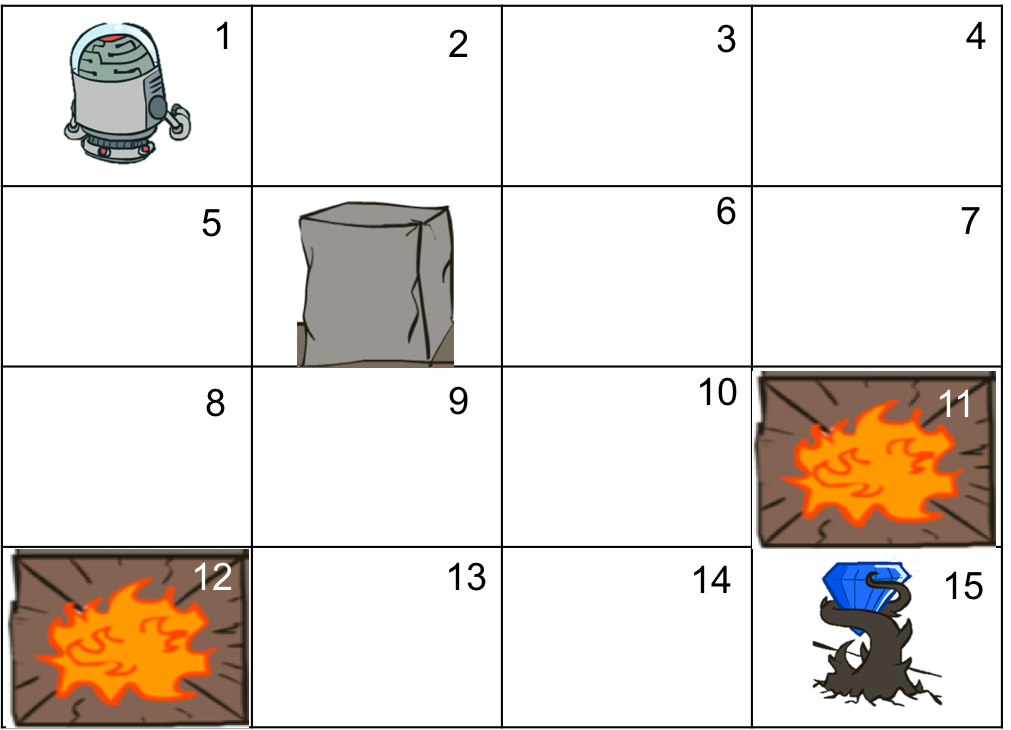
还是以走迷宫为例(如图所示),并且考虑确定性迷宫这种简单情况。我们的目标是估计出每个状态s下,采取每一个动作a的动作值函数Q,即从s出发,第一步采取动作a所能获得的最大回报。那么,一个简单的想法是,从某个状态s出发,例如状态1,如果某一次行动,采用动作a=向右获得了钻石,那么动作a=向右更有可能有较大的Q;相反如果a=向下掉到了火坑,那么动作a=向下更有可能有较小的Q。这表明,从某一次的尝试中,已经能够获得一些关于环境的信息,虽然信息量没有多到足以完全确定最优策略的地步,但是这个信息已经可以用来更新我们的策略了。例如,在以后的尝试中,可以给动作a=向右以更大的概率,而给动作a=向下以更小的概率。
为什么估计动作值函数而不是状态值函数?
我们的目标是得到动作值函数Q(s, a)而不是状态值函数V(s),因为只有状态值函数V(s)的情况下,我们还需要知道转移概率P才能得到动作值函数,反过来则简单得多。在环境未知,也就是转移概率你无法知道,所以要估计动作值函数
如果我们从状态s出发,采用动作a尝试了n次,每一次的总回报为$G_i$,那么容易估计出期望回报
$$
Q_n(s, a) = \frac{1}{n}\sum_{i=1}^n G_i
$$
想象一下,这n次行动是一次执行的,上式需要这n次尝试完全结束后,才能估计Q,事实上可以把上式改写为递归形式
$$
Q_n(s, a) = \frac{1}{n}(G_n + (n-1) Q_{n-1}(s, a)) \\
= Q_{n-1}(s, a) + \frac{1}{n}\left( G_n - Q_{n-1}(s, a) \right)
$$
也就说,每一次尝试实际得到的回报可以用来调整之前对Q函数的估计,每一次对Q函数的改变就是上一次估计的误差$G_n - Q_{n-1}(s, a)$乘上一个系数$\alpha = \frac{1}{n}$。
这种利用经验从未知环境中估计值函数的方法叫做蒙特卡罗法。
梯度下降