等式约束问题
对于线性方程等式约束问题
$$
\begin{align}
\min \quad & f(x) \\
s.t. \quad & A x =b
\end{align}
$$
根据KKT最优条件可知最优解满足方程
$$
Ax^ * = b, \nabla f(x^ * ) + A v^ * = 0
$$
后一个式子实际上是说,在最优解处,f的梯度在A列向量的子空间中!A是向量的时候,有个直观的几何解释!即f的等高面与超平面相切!
等式约束二次规划 有闭式解,上述条件变成了一个线性方程问题!设$(f(x) = 1/2 x^T P x + q^T + r)$,那么KKT条件变为
$$
Ax^ * = b, P x^ * + A v^ * + q = 0
$$
这是一个线性方程,可以利用线性方程求解方法如高斯消元法、迭代算法等求解。
如果方程有解,那么所有的解都是可行解!如果方程无解,那么表示原问题没有最小值!
消除等式约束 方法:先求解线性方程得到通解 $(\{Fz + \hat{x}| z \in R^{n-p}\})$,然后代入目标函数,消除等式约束!
求解对偶问题 : 对偶问题是无约束优化问题。
$$
\min_v b^T v + f^ * (-A^T v)
$$
牛顿方法 即在迭代点附近用一个二次函数近似f(x),这样一来,在每次迭代的时候,就是在求解等式约束二次规划,有闭式解!从而可以很方便求出下降步长!
内点法
凸优化问题
$$
\begin{align}
\min \quad & f(x) \\
s.t. \quad & f_i(x) \le 0 \\
& Ax=b
\end{align}
$$
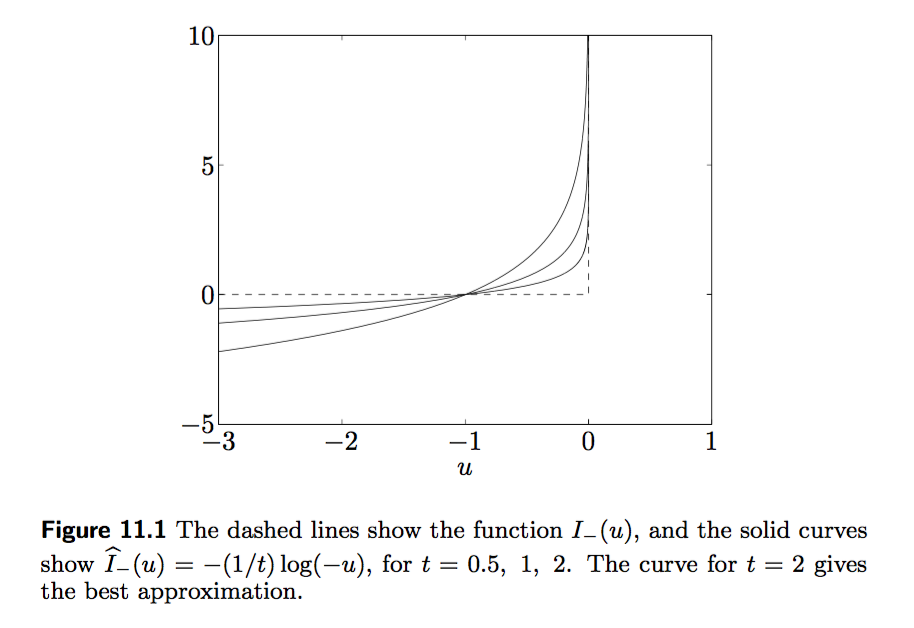
定义示性函数
$$
I_-(x) = \begin{cases}
0 \quad x \le 0 \\
\infty \quad x > 0
\end{cases}
$$
通过这个示性函数,可以将不等式约束去
$$
\begin{align}
\min \quad & f(x) + \sum_i I_-(f_i(x))\\
s.t. \quad & Ax=b
\end{align}
$$
对数壁垒函数:由于示性函数不可微,可以用可微函数近似,一种选择是采用如下对数函数
$$
\hat{I_-}(x) = - \frac{1}{t} \log(-x)
$$
随着参数t趋近于无穷大,对示性函数的近似度越来越好!在这种壁垒函数选取下,最优解可以通过牛顿法求解,最优解跟t有关,$(x(t))$随t变动而形成的轨迹叫做 中心路径。并且有
$$
f(x^ * (t) ) - p ^ * < m/t
$$
m是不等式约束的个数。p是最优f值,$(x^ * (t) )$是壁垒函数近似的最优解!因此,随着t增大,可以控制误差在指定的范围内!