Table of Contents
关于
PID控制器是控制领域的经典控制方法。反馈环路由比例、积分、微分三部分。
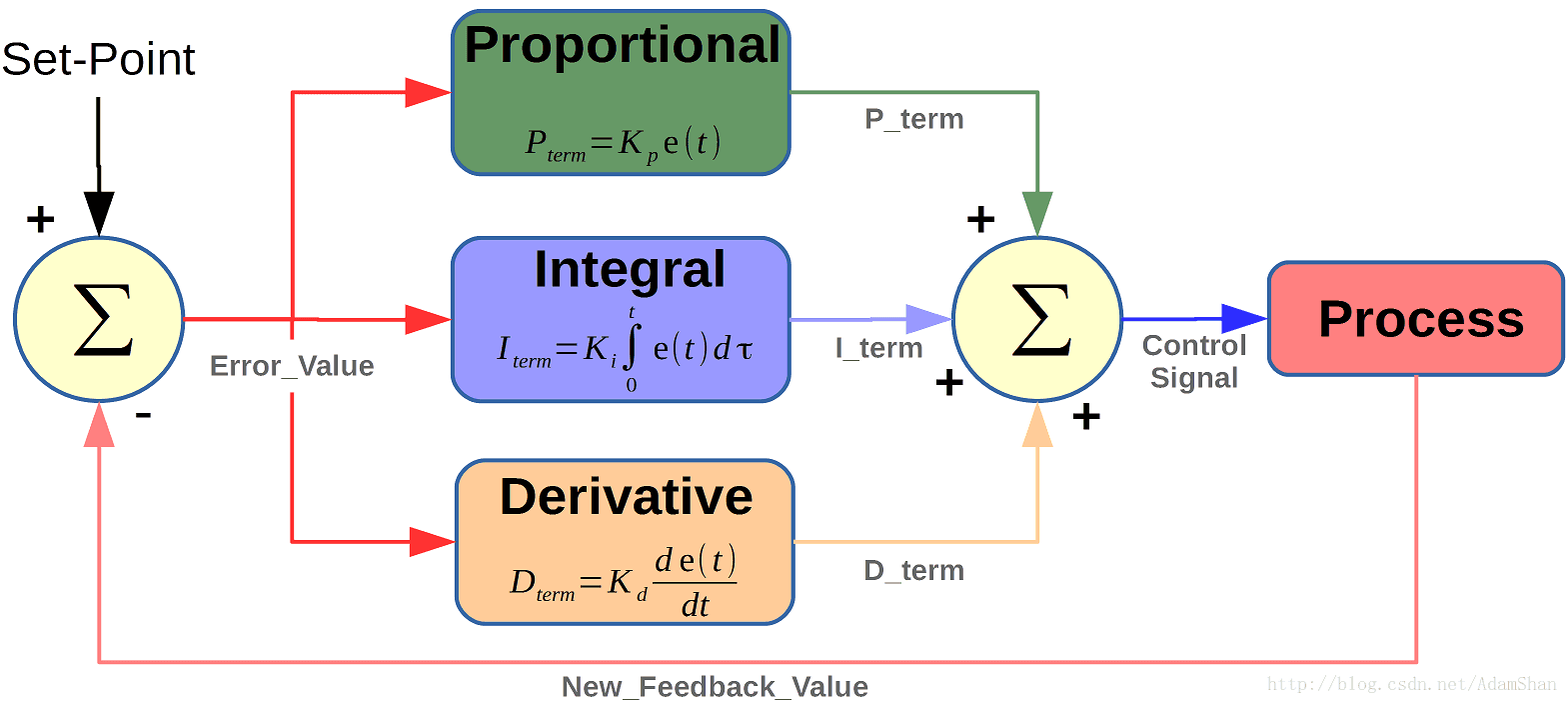
比例控制
- 以RC电路为例,假设电源输入电源为u,是控制量,电阻R上电压x为输出量,控制的目标是让x稳定
- 系统方程为
$$
C \frac{d x}{d t} + x = u
$$ - 开环增益为(拉普拉斯变换)
$$
G(s) = \frac{X(s)}{U(s)} = \frac{1}{sC + 1}
$$ -
假设用比例反馈控制,对误差的增益为K,那么
-
比例控制P control能够提高系统的响应速度和稳态精度,抑制扰动对系统稳态的影响。但过大的比例控制容易导致系统超调和振荡,并且有可能使得系统变得不稳定。 纯比例控制并不能消除稳态误差,存在静差。